Research
 Stability of Control Lyapunov Function Guided Reinforcement Learning
Stability of Control Lyapunov Function Guided Reinforcement LearningCaltech, 2026
 Chasing Autonomy: Dynamic Retargeting and Control Guided RL for Performant and Controllable Humanoid Running
Chasing Autonomy: Dynamic Retargeting and Control Guided RL for Performant and Controllable Humanoid RunningCaltech, 2026
 Chasing Stability: Humanoid Running via Control Lyapunov Function Guided Reinforcement Learning
Chasing Stability: Humanoid Running via Control Lyapunov Function Guided Reinforcement LearningCaltech, 2025
 CLF-RL: Control Lyapunov Function Guided Reinforcement Learning
CLF-RL: Control Lyapunov Function Guided Reinforcement LearningCaltech, 2025
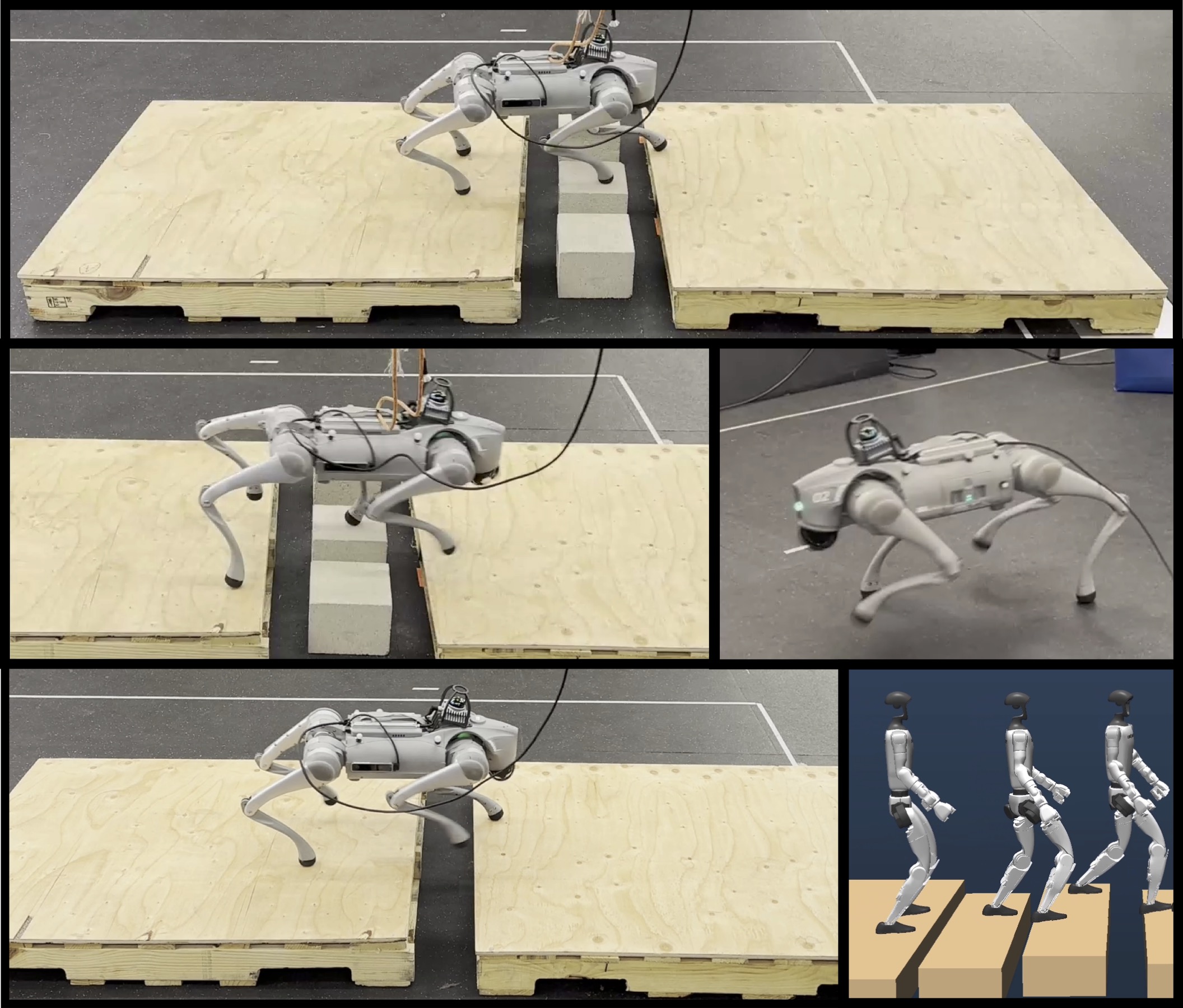 Locomotion on Constrained Footholds via Layered Architectures and Model Predictive Control
Locomotion on Constrained Footholds via Layered Architectures and Model Predictive ControlCaltech, 2025
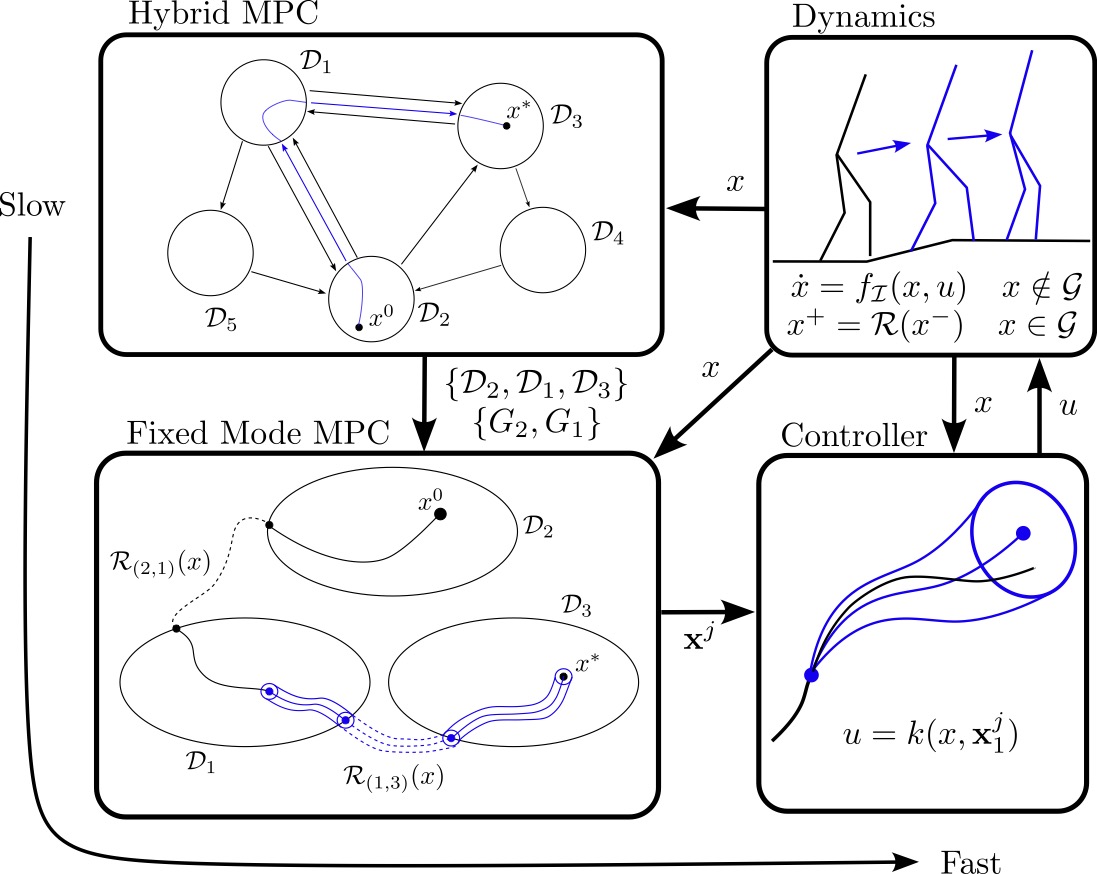 Layered Nonlinear Model Predictive Control for Robust Stabilization of Hybrid Systems
Layered Nonlinear Model Predictive Control for Robust Stabilization of Hybrid SystemsCaltech, 2024
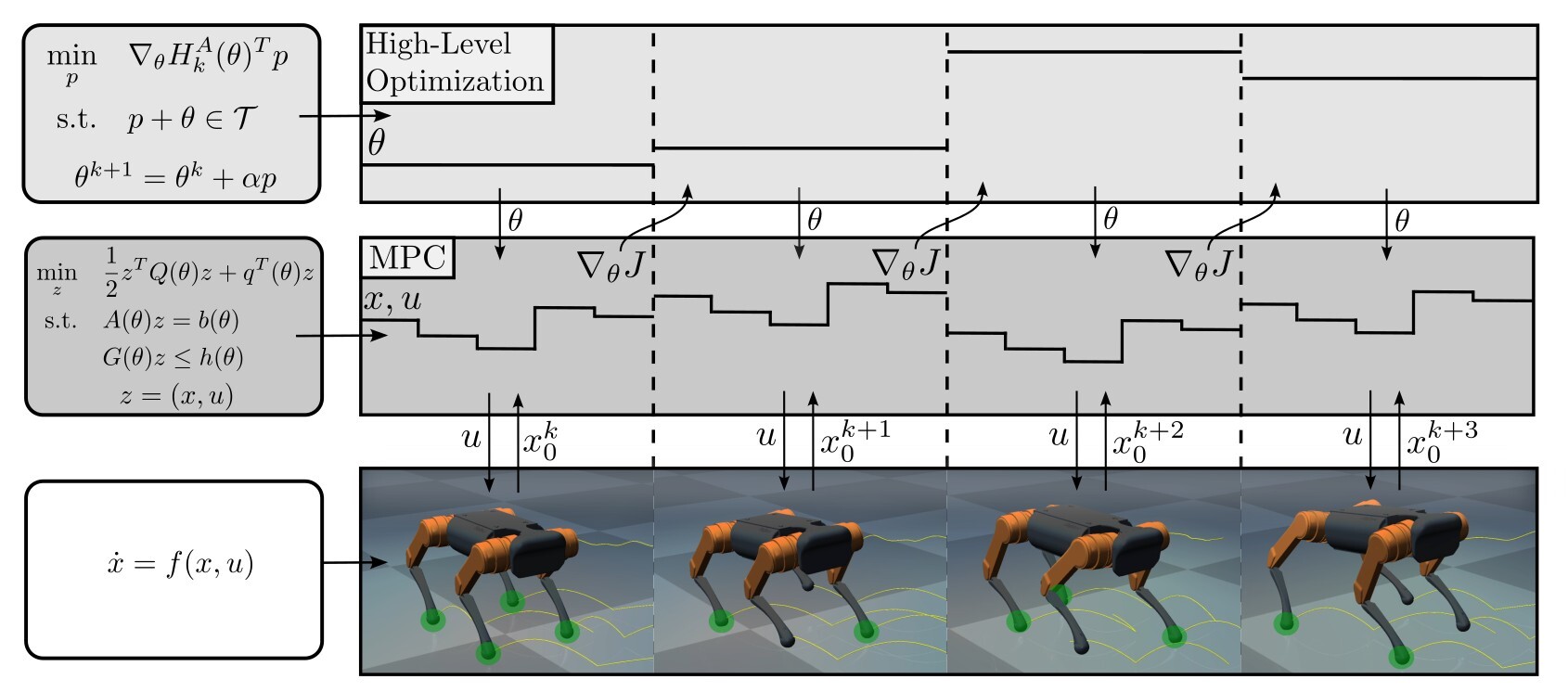 Bilevel Optimization for Real-Time Control with Application to Locomotion Gait Generation
Bilevel Optimization for Real-Time Control with Application to Locomotion Gait GenerationCaltech, 2024
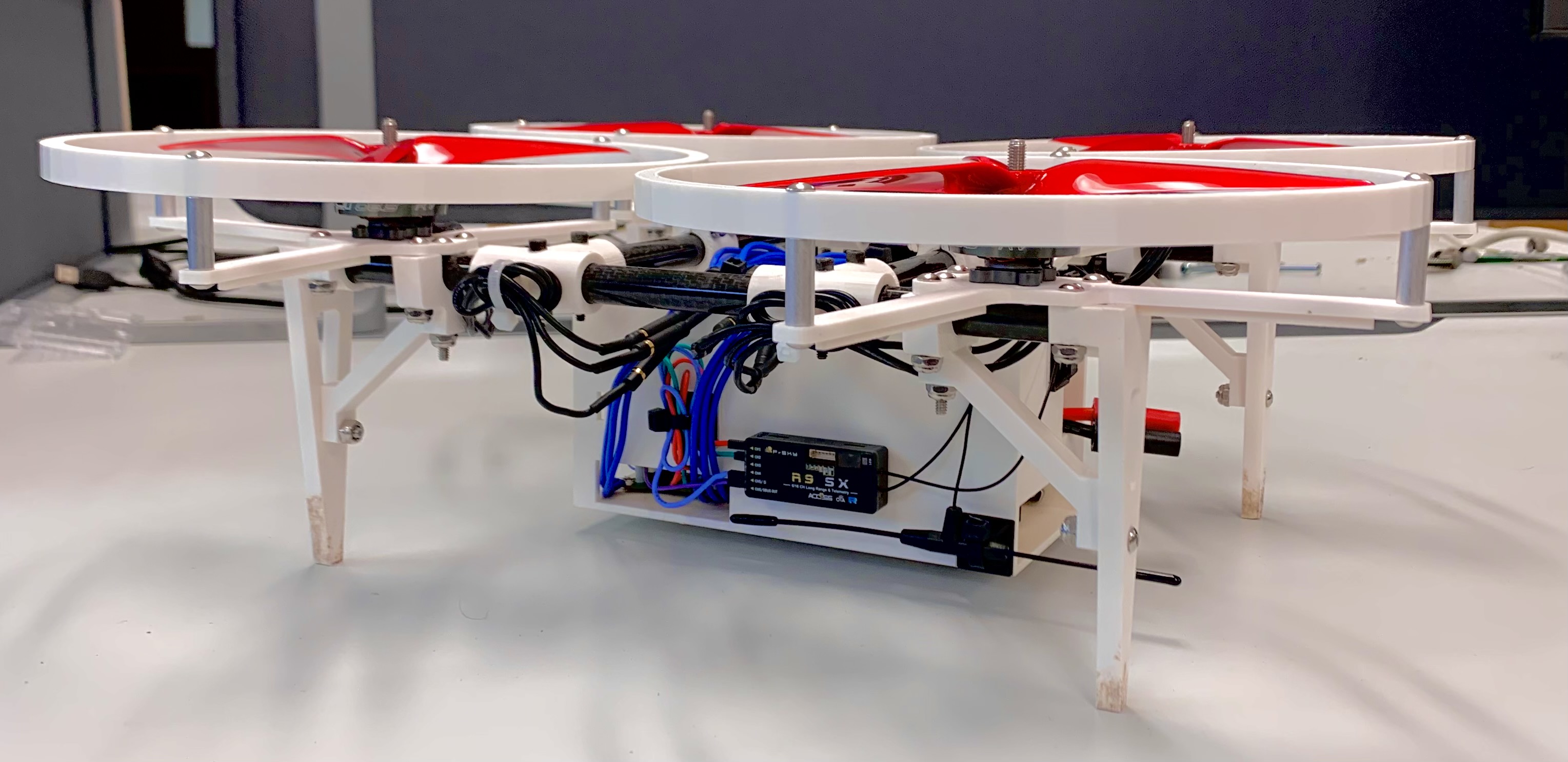 Custom First Responder Drone
Custom First Responder DroneGeorgia Tech, 2022
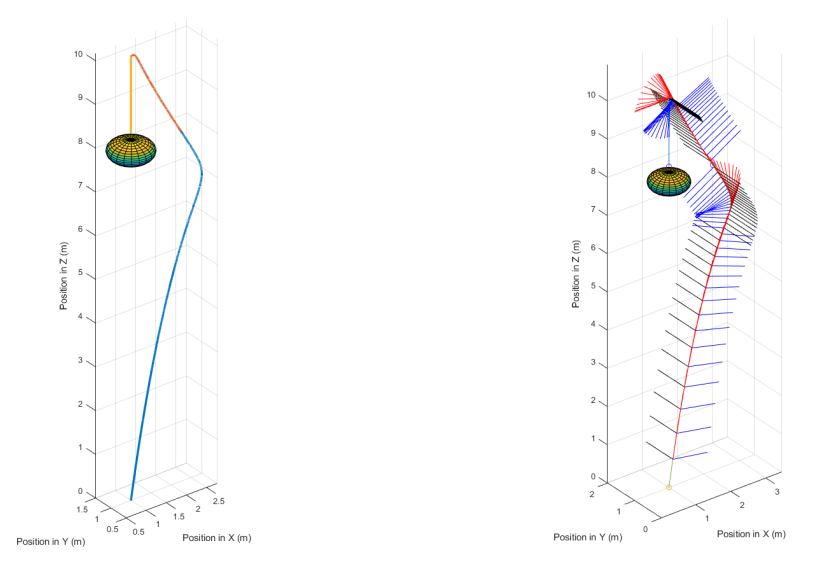 Autonomous Quadrotor Trajectory Planning and Control for In-Flight Aerial Vehicle Capture
Autonomous Quadrotor Trajectory Planning and Control for In-Flight Aerial Vehicle CaptureGeorgia Tech, 2021
 Drone Dock Cruise Control
Drone Dock Cruise ControlGeorgia Tech, 2021
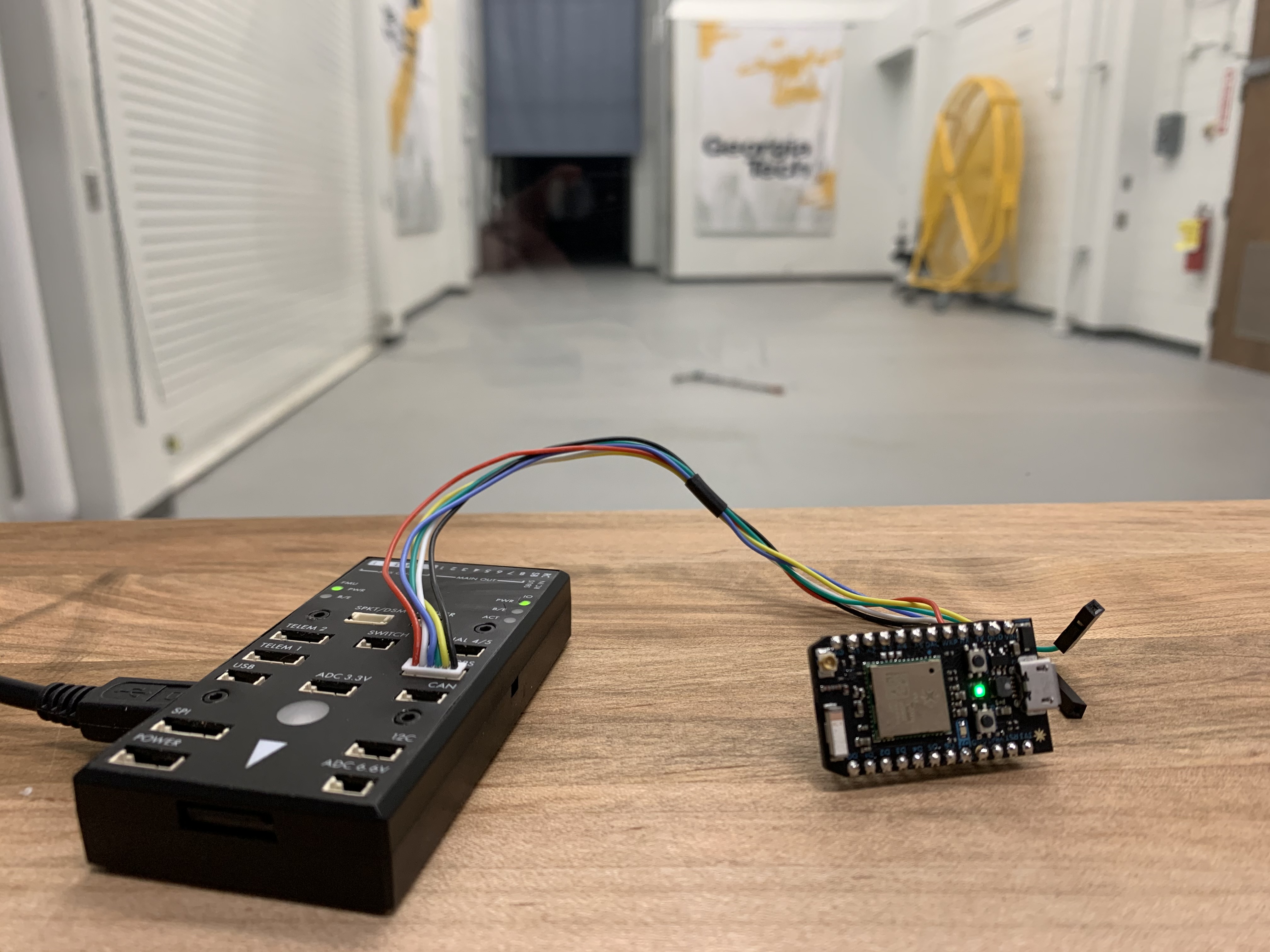 Indoor Flight Lab Synthetic GPS
Indoor Flight Lab Synthetic GPSGeorgia Tech, 2021